Китайские ученые создали управляемого магнитным полем микроробота, способного нести на себе живые клетки и доставлять их в нужную область тела. Испытания в лабораторных условиях, а также на мышах и эмбрионах рыб, показали работоспособность робота, рассказывают разработчики в журнале Science Robotics.
Ученые давно работают над созданием медицинских микророботов, работающих внутри человеческого тела. Предполагается, что в будущем такие роботы позволят доставлять лекарства или стволовые клетки к конкретным органам или даже их областям. В случае с лекарствами это позволит не наносить вред остальным частям организма при наличии побочных эффектов, а доставка стволовых клеток к органам рассматривается учеными как перспективный способ восстановления поврежденных тканей. Одна из главных проблем в этой области заключается в сложности создания носителя для клеток, который мог бы хорошо удерживать их, а также поддерживать их рост и дифференциацию.
Исследователи под руководством Дун Суня (Dong Sun) из Городского университета Гонконга разработали биосовместимого микроробота для доставки клеток в живые организмы. Как и другие разработчики медицинских микророботов, они использовали магнитное управление, позволяющее не оснащать робота двигателем, аккумулятором и микроконтроллером. Робот представляет собой сферическую фуллеренообразную конструкцию с множеством лучей, расстояние между которыми подбирается в соответствии с размером переносимых клеток.
Ученые создавали микророботов с помощью трехмерной лазерной литографии, при которой фоточувствительный полимер затвердевает в заданных местах под действием сфокусированного лазерного луча. После создания полимерного каркаса на него наносили слой никеля толщиной 100 нанометров, позволяющий управлять движением робота с помощью магнитного поля, а также слой титана толщиной 20 нанометров, обеспечивающий биосовместимость. Размеры микророботов варьировались от 70 до 90 микрометров в зависимости от того, для какого типа клеток они были рассчитаны.
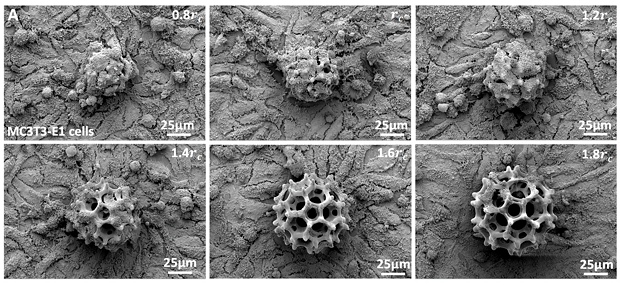
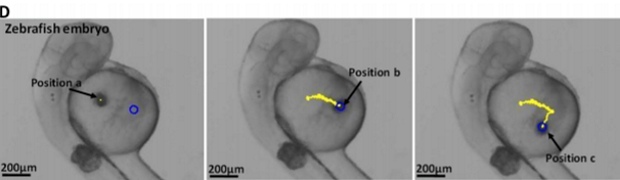
Исследователи использовали в качестве модельных клеток мышиные фибробласты и мезенхимальные стволовые клетки. Изначально авторы провели первичные тесты вне живых организмов и проверили управление микророботом с помощью электромагнитной системы. Кроме того, ученые провели эксперименты внутри живого эмбриона данио-рерио, поскольку он прозрачен и тем самым удобен для отслеживания перемещения микроробота.
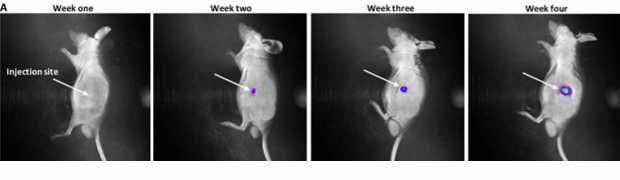
Также авторы провели испытания множества микророботов на лабораторной мыши, покрыв поверхность робота раковыми клетками. Исследователи показали, что клетки могут самопроизвольно отсоединяться от робота после доставки к нужному органу.
В прошлом году американские ученые создали микроробота, состоящего из полимерных кубов, частично покрытых металлом. За счет этого с помощью магнитного поля можно управлять их движением, а также собирать из них более крупную конструкцию, которая может захватывать объекты, в том числе клетки, и двигать их в определенном направлении.






